Turing machine simulator (Ruby)
From LiteratePrograms
- Other implementations: C | C++ | C++ | Haskell | Java | LaTeX | OCaml | Ruby | Scheme | Sed | Unlambda
We describe a simple Ruby program for simulating an abstract Turing machine. This demonstrates that Ruby is Turing-complete (with the caveat that limitations in word size limit the effective addressable memory).
Contents |
Formal problem description and assumptions
We define a single-tape Turing machine as a 6-tuple  , where
, where
- Q is a finite set of states;
- Γ is the finite tape alphabet (the symbols that can occur on the tape);
 is the initial state;
is the initial state;
 is the blank symbol;
is the blank symbol;
 is the set of accepting (final) states;
is the set of accepting (final) states;
 is the transition function which determines the action performed at each step.
is the transition function which determines the action performed at each step.
Initially the tape has the input string on it, followed by an infinite number of blank symbols ( ), and the head is at the left end of the tape. At each step we use the transition function to determine the next state, the symbol written on the tape just prior to moving, and the direction to move the head, left (L) or right (R). If we ever reach a final state, the machine halts.
), and the head is at the left end of the tape. At each step we use the transition function to determine the next state, the symbol written on the tape just prior to moving, and the direction to move the head, left (L) or right (R). If we ever reach a final state, the machine halts.
Main simulator
State representation
We represent states and symbols using Ruby symbols. The State class has instance variables describing the tape contents, the current position of the head on the tape, and the current control state. There are methods to initialize, update, and trace the state and convenience methods for accessing the tape:
<<State class>>= class State attr_reader :tape attr_reader :head attr_reader :control_state initialize state method update state method trace state method convenience methods end
To initialize the state, we initialize the tape with the input string, position the head at the start of the tape, and set the initial control state:
<<initialize state method>>= def initialize(initial_state, input_string) @tape = input_string.dup @head = 0 @control_state = initial_state end
We can update the state based on what the transition function tells us to do. It supplies a new control state, a symbol to write, and a direction in which to move the head:
<<update state method>>= def update(next_state, dir, write_symbol) raise "Crash!" if next_state == :invalid @control_state = next_state @tape[@head] = write_symbol case dir when :left raise "Crash!" if @head <= 0 @head -= 1 when :right @head += 1 end end
Note that the head is prevented from moving off the left end. The right end of the tape is auto-expanded with blank symbols by our use of the Array default value above.
For diagnostic purposes, it's also useful to print out some of the details of the state. We'll display the first 60 symbols of tape so that it may easily fit in a terminal. We need to provide a mapping to translate the symbols on the tape to simple screen characters:
<<trace state method>>= def trace(map) if @head < 60 puts " " * (@head + 17) + "v" else puts end tape = (0..60).collect{ |i| map[tape_at(i)] }.join puts "%15s: %s" % [ @control_state, tape ] end
Finally, we provide a convenience methods to fetch symbols from the tape. The tape_at method abstracts access to the tape so we see a blank symbol anywhere the tape has not been written to. The current_symbol method gives us the symbol currently under the head.
<<convenience methods>>= def tape_at(pos) @tape[pos] || :blank end def current_symbol tape_at(@head) end
Machine representation
As mentioned above, Q and Γ are represented by Ruby symbols. We also assume the convention, demonstrated above, of using the symbol :blank to represent the blank symbol. The TuringMachine class represents the remaining information about the machine:
<<Turing machine class>>= class TuringMachine attr_accessor :start_state attr_reader :accepting_states attr_reader :transitions initialize machine method run simulation method end
The transition table is a hash which maps state/symbol pairs as the input key which to state/symbol/direction triples as the output value.
While accepting_state is simply initialized to an empty array, we must provide a default value for transitions in order to handle bad input. We use a special state :invalid to indicate this default production. Further specification of the machine is delayed until "programming", discussed below.
<<initialize machine method>>= def initialize @accepting_states = [] @transitions = Hash.new{ [ :invalid, :blank, :left ] } end
Simulation
We now come to our primary simulation function. Using our machine state functionality, we can take a programmed TuringMachine object, feed it an input string and step through successive states. We provide a mapping of symbols to characters so that it can be passed on to the state tracing method:
<<run simulation method>>= def simulate(input_string, map) state = State.new(@start_state, input_string) state.trace(map) until @accepting_states.include?(state.control_state) next_state, write_symbol, dir = @transitions[[state.control_state, state.current_symbol]] begin state.update(next_state, dir, write_symbol) rescue Exception => e puts e return end state.trace(map) end end
Files
We place each of the classes above into their own files, as is the usual ruby idiom. The TuringMachine class depends on the State class, so we require the state library file in the Turing machine library:
<<state.rb>>= State class <<turing_machine.rb>>= require 'state' Turing machine class
Test driver
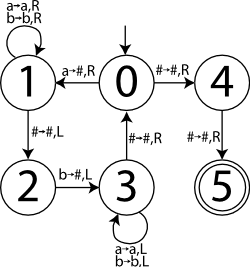
To test the simulation, we'll implement the simple Turing machine shown to the right, which is based roughly on this Turing machine example. This diagram is a state graph, meaning that each vertex represents a state in the machine's finite control, and each edge indicates the input character that must be read to follow that edge, the character to write over it, and the direction to move the head. The initial state is 0 and the only accepting state is 5. It recognizes the following context-free but nonregular language:

The pumping lemma says that this is nonregular, but a Turing machine to recognize it is fairly straightforward. We'll begin by instantiating a TuringMachine object for it and "programming" that object with the start and finish states:
<<Example turing machine>>= machine = TuringMachine.new machine.start_state = :start machine.accepting_states << :finish define transitions
We then add entries for each arc in the diagram:
<<define transitions>>= machine.transitions[[ :start, :a ]] = [ :scan_right, :blank, :right ] machine.transitions[[ :scan_right, :a ]] = [ :scan_right, :a, :right ] machine.transitions[[ :scan_right, :b ]] = [ :scan_right, :b, :right ] machine.transitions[[ :scan_right, :blank ]] = [ :reverse, :blank, :left ] machine.transitions[[ :reverse, :b ]] = [ :scan_left, :blank, :left ] machine.transitions[[ :scan_left, :a ]] = [ :scan_left, :a, :left ] machine.transitions[[ :scan_left, :b ]] = [ :scan_left, :b, :left ] machine.transitions[[ :scan_left, :blank ]] = [ :start, :blank, :right ] machine.transitions[[ :start, :blank ]] = [ :check, :blank, :right ] machine.transitions[[ :check, :blank ]] = [ :finish, :blank, :right ]
Now, we simply invoke the simulate method object, allowing the user to specify the initial input on the command line:
<<example_turing_machine.rb>>= require 'turing_machine' unless ARGV.size == 1 STDERR.puts "Usage: simulate_turing_machine <input string>" exit(-1) end # convert string into list of symbols input_string = ARGV.first.split(//).map{ |ch| ch.intern } Example turing machine # define trace map map = { :blank => '#', :a => 'a', :b => 'b' } # run simulation machine.simulate(input_string, map)
If we run the program on a string in the language, like "aaabbb", the program will return quickly; otherwise it will work for a bit, then print out "Crash!" when it tries to perform an invalid transition. We ensure it's going through the right intermediate states through the tracing we added to the simulate function.
Now we can see, for example:
<<example_output.txt>>= $ ruby example_turing_machine.rb ab v start: ab########################################################### v scan_right: #b########################################################### v scan_right: #b########################################################### v reverse: #b########################################################### v scan_left: ############################################################# v start: ############################################################# v check: ############################################################# v finish: #############################################################
See Turing machine simulator (Ruby)/Example output for a longer example output.
| Download code |